
Result description
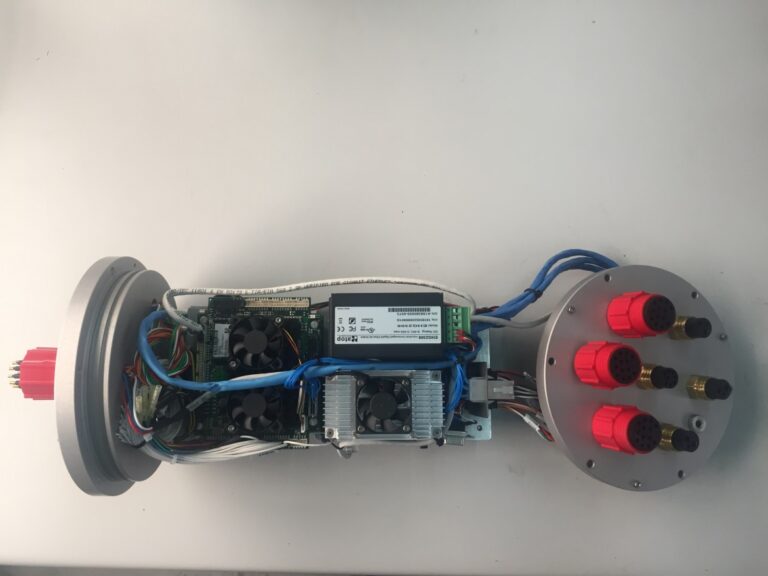
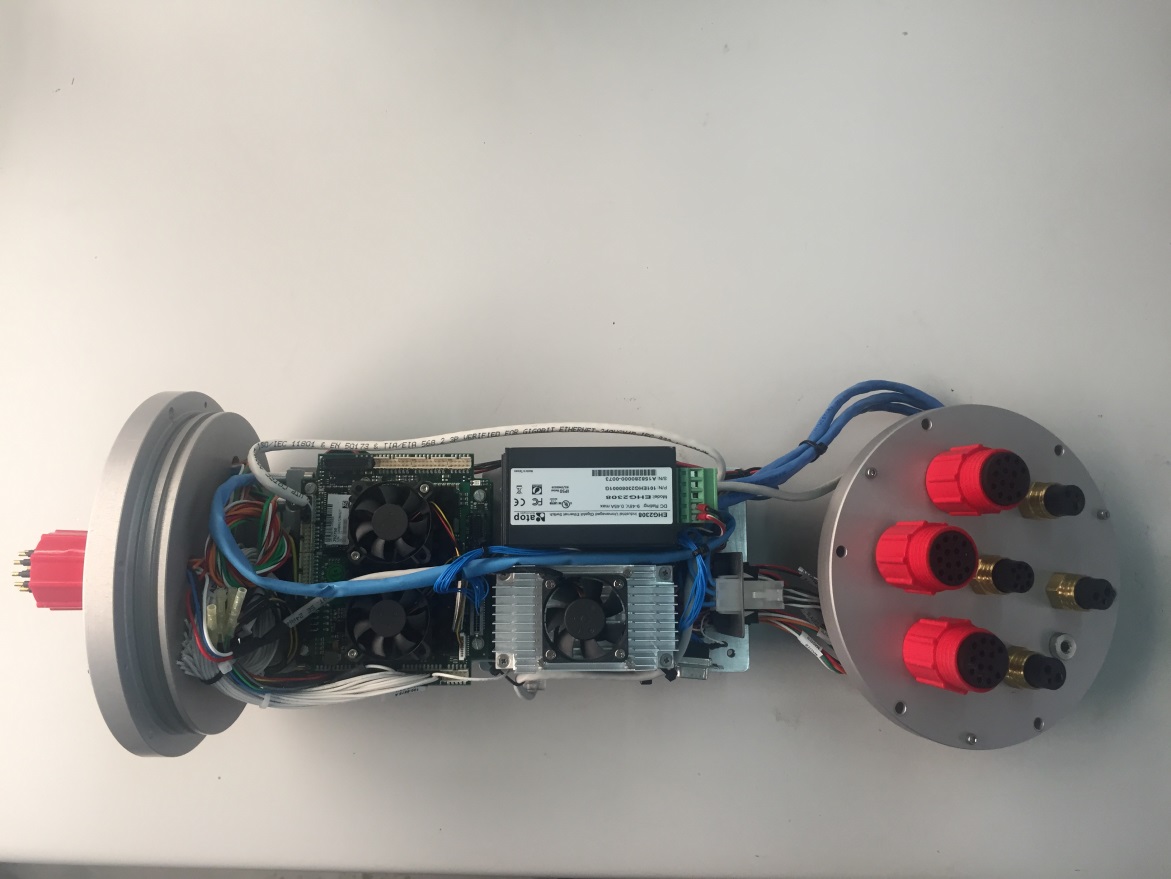
This result presents a new underwater housing able to work at 500 meters depth and containing: 2 PCs, 1 based on Nvidia Jetson TX2 and another one based on an x86_64 (intel) architecture, a Gigabit Ethernet switch and drivers for controlling the LEDs.
The system is able to send and receive messages from an AUV or ROV using ROS.
The system is trained to detect manganese nodules but it can be retrained and adapted for other purposes.
Addressing target audiences and expressing needs
- Grants and Subsidies
- Business partners – SMEs, Entrepreneurs, Large Corporations
Increase of market share for the technology
- Public or private funding institutions
- Other Actors who can help us fulfil our market potential
- Research and Technology Organisations
- Academia/ Universities
- Private Investors
R&D, Technology and Innovation aspects
The system was tested using the ROBUST project AUV and controlled 2 gigabit ethernet cameras and 1 MBES. The system was able to detect manganese nodules on real time.
For any interested client the system can be readapted to their specific needs. Adaptations can be done in hardware (changing elements or connectors) or in software (retraining the network for other object detection purposes).
Result submitted to Horizon Results Platform by CORONIS COMPUTING SL
{kind=link}