
Result description
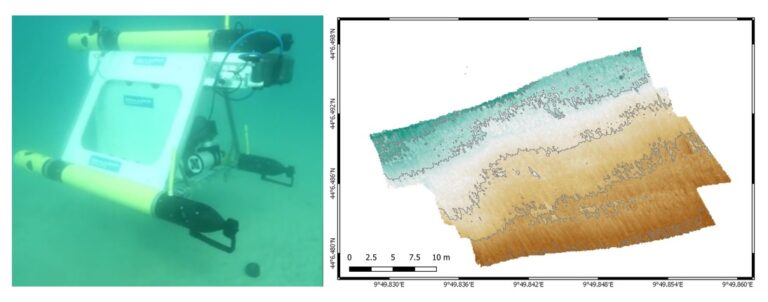
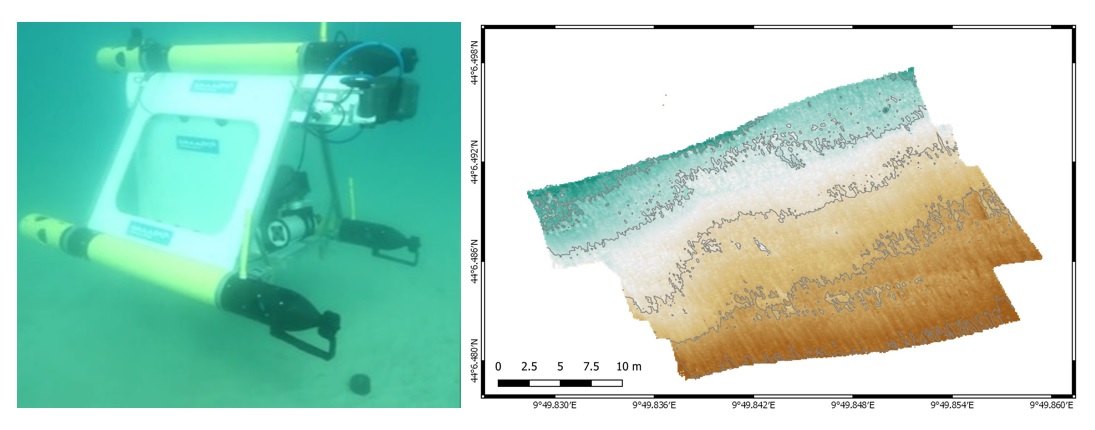
We utilized the open source software MB-System to automate the traditional MBES data processing steps, like re-navigation or offsets and sound velocity correction for ray tracing. Heuristics were used to flag noisy data. For drift correction, a C++ software was created to divid the data into sub-sections and respective map-tiles for matching overlapping tiles. If a better match is found, the navigational offset is integrated into the corrected navigation, resulting in reduction of navigational artifacts in the generated maps.
Ground truth data were used to link Mn-nodule abundance to bathymetry using Random Forests and the most significant features were established alongside their preferred value ranges. Features are derived from a given map using SAGA GIS and value ranges are applied to form binary classifiers. Regions where all classifiers are true are considered promising. The largest potential area is determined and used as starting point for visual exploration. All of these procedures were tested on board of the ROBUST AUV. The validation of the drift elimination was tested on a ship based MBES survey; detecting the promising area was tested on data from a Mn-nodules site.
Addressing target audiences and expressing needs
- Grants and Subsidies
- Business partners – SMEs, Entrepreneurs, Large Corporations
Tools that allow for objective and flexible data processing. Software that enables autonomous AUV missions.
- Public or private funding institutions
- Other Actors who can help us fulfil our market potential
- Research and Technology Organisations
- Academia/ Universities
- Private Investors
R&D, Technology and Innovation aspects
Technology tested and verified in real environment
Result submitted to Horizon Results Platform by HELMHOLTZ ZENTRUM FUR OZEANFORSCHUNG KIEL
{kind=link}